::产品概述::
Freedom H5R/LW2 灵巧手
本灵巧手模仿人手的自由度分配及相关运动学参数进行设计的灵巧手,整手的手指设计采用了模块化的思想。

整机重量轻,单指指尖抓取力强,五指灵巧手作为人体机器人或者机械臂末端操作工具,在工业生产的特殊环境中,对复杂形状的物体进行自适应抓取,以及复杂任务的操作。该灵巧手,凭借指尖末端多阵列压力传感器,可高精度地执行多种抓取操作。使五指灵巧手可以智能完成大部分的人体手部抓取动作。除了开启抓取和操作任务的全新领域之外,该五指灵巧手还为在五指机械手的常用手势基础上进行人与机器人的交流开创了无限可能。主要应用于各高校、科研研究所、高科技公司以及残疾人假肢手应用等行业的深度研究和开发融合。
技术特征:
五指灵巧手采用5指设计,混合传动的方式,其中拇指3个自由度(旋转,侧摆,弯曲),食指2个自由度(侧摆,弯曲),中指2个自由度(侧摆,弯曲),无名指1个自由度(弯曲),小拇指1个自由度(弯曲)共9自由度,可达到完美模拟人手。指尖配置多阵列触觉传感器,主控板收集采传感器数据,通过力控算法可以实时感知抓握力度,可高精度地执行多种抓取操作,使五指机械手实现智能抓取。五指灵巧手可以完成大部分的人体手部抓取动作和常用的人体的手势动作。开启抓取和操作任务和机器人手势交流的全新领域。
1.1 技术指标
连杆灵巧机械手有左手和右手两种版本。使用12V直流供电,适合移动应用。通过定义的接口可轻松连接市场中标准的工业机器人和轻型机器人。
指标 | 参数 | 指标 | 参数 |
名称 | 五指灵巧手 | 响应速度 | 1ms |
自由度 | 9 | 净重 | 875g±10g |
额定电流 | 5A | 额定电压 | 12V |
额定功率 | 60W | 额定负载(单指/四指抱拳) | 3kg/10kg |
通信接口 | /RS485/CANFD | 额定负载下速度 | 90度/0.8s |
触觉传感位置 | 指尖,手掌(选配) | 触觉反馈 | 16点阵列压力传感器 |
触觉传感器范围 | 0-3N(单点) | 位置反馈 | 支持 |
2 设备安装
主要内容
该章主要描述灵巧手设备安装
l 设备配件
l 设备连接
2.1 设备附件
五指灵巧手设备附件主要包括:USB转串口、电源适配器、WIFI模块(可选配)。
1. USB转串口:
图. 3-1 USB转串口
2. 电源:采用直流12V开关电源适配器作为工作电源。

图. 3-2 电源
3、Wif模块:WIFI模块,实现无线传输(可选配)。
4、安装底座及固定螺丝:可根据客户要求进行尺寸设计和定制。
2.2 设备连接
2.2.1 接口定义
通信接口在灵巧手底部,接口定义如图3-3所示
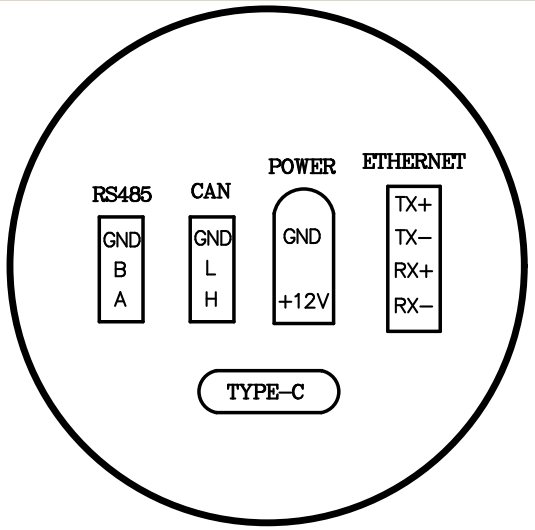
图3-3接口定义
2.2.2 连接示意
灵巧手连线图如下图3-4所示:

图. 3-4设备连接示意图
3 机械结构
主要内容
该章主要描述灵巧手机械结构
l 外观尺寸
l 自由度详解
l 触觉传感器
3.1
外观尺寸
五指灵巧手模仿人手的自由度分配及相关运动学参数进行设计的灵巧手,整手的手指设计采用了模块化的思想,整手尺寸高222mm,宽度为124mm,厚度142mm,重约875g。外观图如下所示:

图 4-1灵巧手外观尺寸
3.2 自由度详解
灵巧手具备9个主动自由度
拇指旋转:拇指整体向食指方向侧向运动,运动角度范围0°到90°
拇指侧摆:拇指整体靠近掌心运动为正,掌心方向为负,运动角度范围-45°到45°
拇指弯曲:拇指第三指节向内测弯曲,运动角度范围0°到90°
食指侧摆:食指可以向拇指方向进行侧摆角度范围0到10°,食指也可以向中指方向进行侧摆角度范围0°到-10°
中指侧摆:中指可以向食指方向进行侧摆角度范围0到10°,中指也可以向=无名指方向进行侧摆角度范围0°到-10°
无名指和小拇指第2和3直接是耦合运动的角度运动范围0°到90°
3.2.1 大拇指
拇指旋转示意图如图4-2以及4-3所示:

图4-2
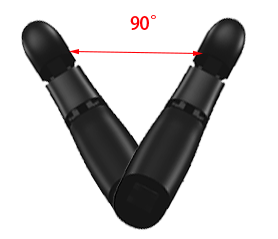
图4-3
拇指侧摆示意图如图4-4所示
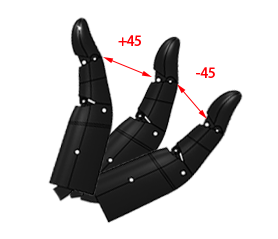
图4-4
拇指弯曲示意图如图4-5所示
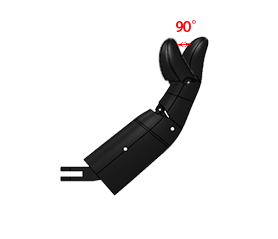
图4-5
3.2.2 食指和中指
食指和中指分别具有两个自由度,侧摆和弯曲侧摆动如图4-6所示弯曲如图4-7所示
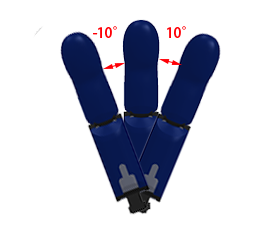
图4-6
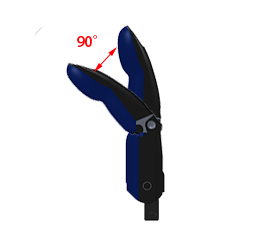
图4-7
3.2.3 无名指小拇指
无名指小拇指只有弯曲角度,弯曲角度示意参考图4-7
3.3 触觉传感器
触觉传感器采用灵敏度高弛豫时间低的柔性压敏材料、稳定性高的“柔性-非柔性”界面过渡材料、弹性好机械强度高的柔性包覆与支撑材料、节点间的柔性(非挠性)互连材料为主要本体材料,同时结合CMOS工艺技术,通过在CMOS触觉传感器读出芯片基底上沉积聚合物材料,实现复合传感结构,构成单片的触觉传感单元(即节点);并采用柔性技术实现传感单元间的互连与信号读出。首先采用弹性好、可塑性强的聚二甲基硅氧烷聚合物作为基材,碳纳米管作为压敏性复合材料的导电填料,合成具有压阻特性的新型力敏复合材料,制备成具有良好的柔性、抗疲劳性强、动态范围大、阵列单元多等特点的阵列式柔性触觉传感器。然后将触觉传感器、超宽动态范围的读出电路、阶梯式分辨率的传感器接口电路、信号处理主芯片进行集成组成完整的传感系统。
指尖触觉传感器设计上下面电极为“四横四纵”形式,从而将整块压敏材料自动分割成4×4矩阵形式具有16个阵列点,即16个压阻单元,其单元位置及编号示意图如图4-8所示;灵巧手手指传感器实物抓取中实时返馈如4-9
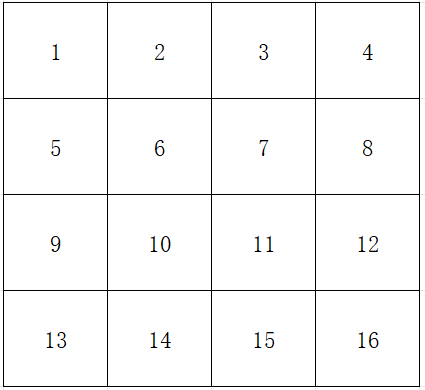
图. 4-8
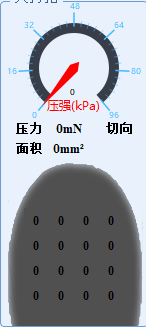
图4-9
3.3.1 压强/切向力/受力面积
触觉传感器可以通过计算得到单位面积收到的压强值,单位是千帕,也可以根据触觉传感器的点云信息得到当前物体收到的切向力方向,应用软件会将压强,切向力和受力面积显示到图4-9中。
4 软件操作
主要内容
该章主要描述设备的软件操作
l 操作界面
l 通信配置
l 运动参数
l 控制
l 演示
l 曲线
4.1 操作界面
软件启动后,软件主页面由通信设置、运动参数,反馈信息,功能页构成。功能页包括控制、演示、曲线。
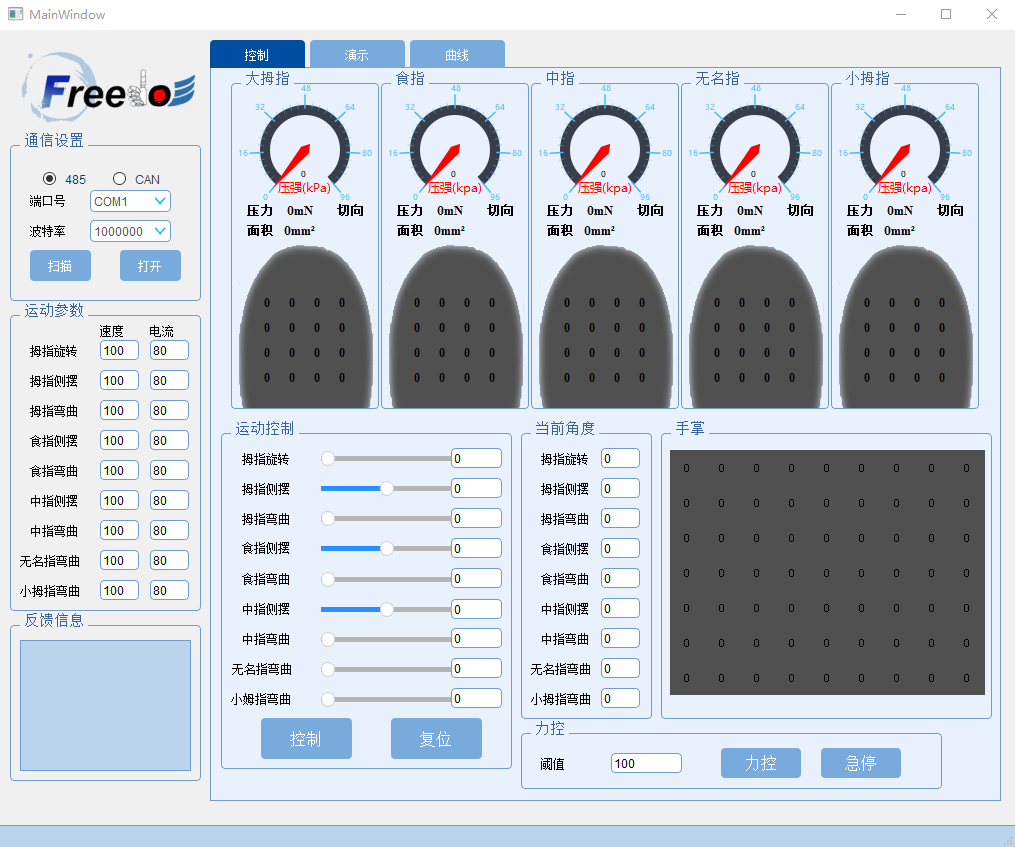
图. 5-1 软件主界面
4.2 通信设置
4.2.1 RS485
通信设置中的单选按钮可以选择当前使用的通信方式485需要设置项为端口号和波特率
端口号:可以从设备管理器中查询,端口号参考图5-2所示括号内部的为端口号
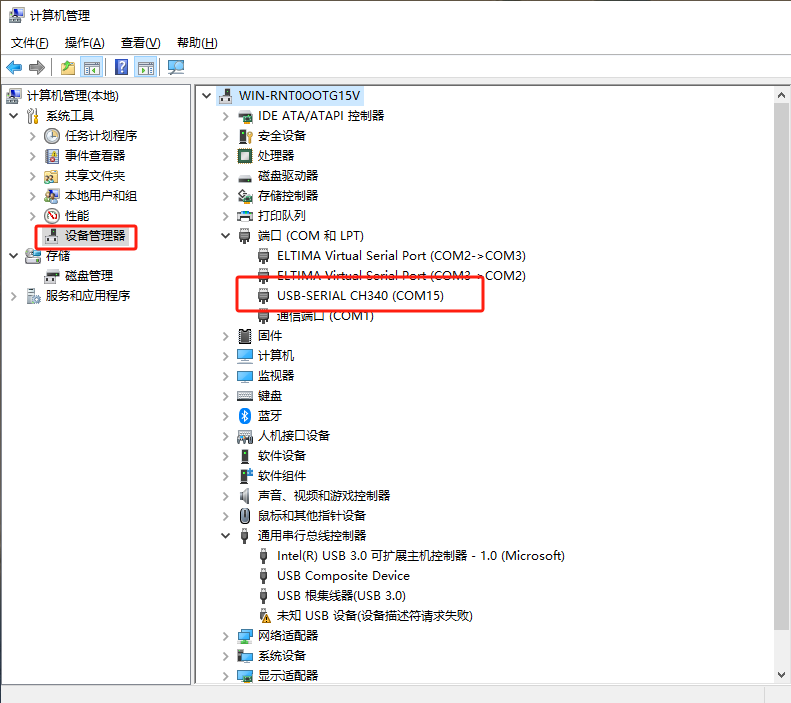
图5-2
波特率:出厂默认波特率是115200,可以通过通信设置软件进行修改,修改过程如图5-3所示,点击修改之前可以选择波特率以及修改ID值

图5-3
4.2.2 CANFD
选择CAN单选框后会出现两个波特率选择,下面的波特率为数据波特率一般默认波特率为1M数据波特率为2M,本灵巧手控制软件支持CANFD设备如图5-4所示
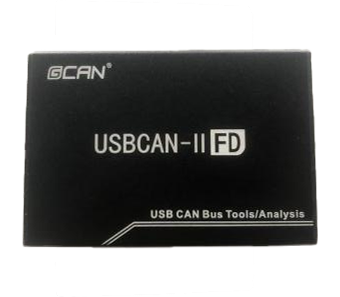
图5-4
4.3 运动参数
运动参数可以分别设置灵巧手9个自由度的速度,电流,如图5-5
速度范围1-100(速度百分比)
电流范围15-150,对应电流值150-1500 (单位毫安)

图5-5
4.4 控制
灵巧手运动控制功能页分为手指传感器显示、手掌传感器显示、运动控制、当前角度、力控,5部分组成。
4.4.1 运动控制
通过滑块或者数值输入调整各个运动关节需要发送的数值后,点击控制按钮即可根据设定的关节角度进行控制,点击复位所有关节回到初始化状态。操作区域如图5-6所示
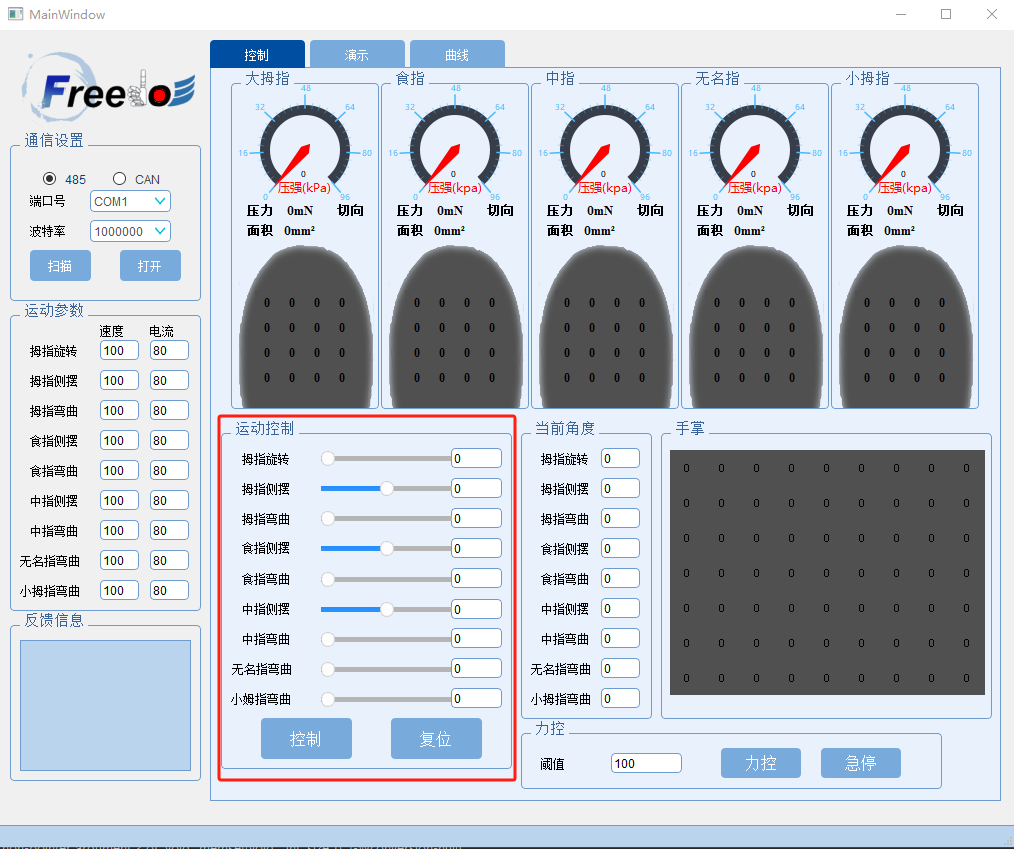
图. 5-6
4.4.2 当前角度
通信连接后灵巧手发聩的角度信息会在图5-7红框区域中的控件上进行显示
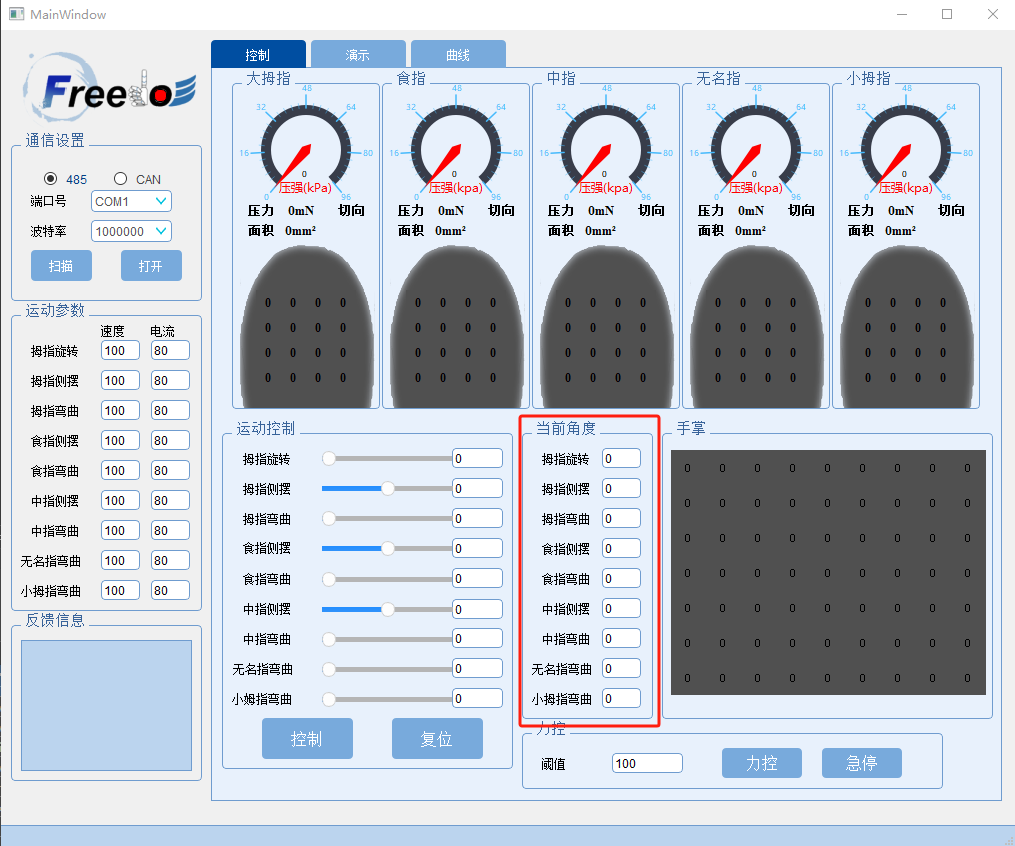
图5-7
4.4.3 传感器显示
图5-8两个红框区域为传感器显示区域,显示内容包括压强(千帕),压力(毫牛),受力面积(平方毫米),按压区域点位分布。
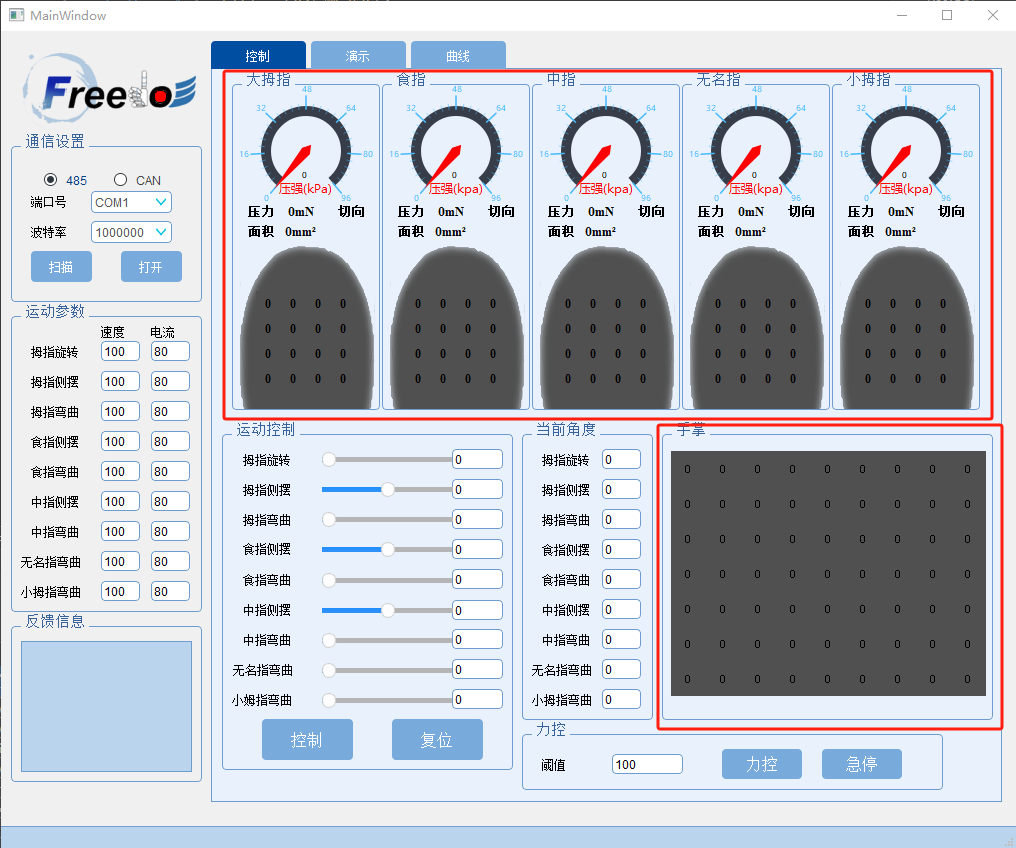
图5-8
4.4.4 传感器力控
力控功能需要先进行力控阈值设定,阈值单位为千帕,设定范围为5-150。
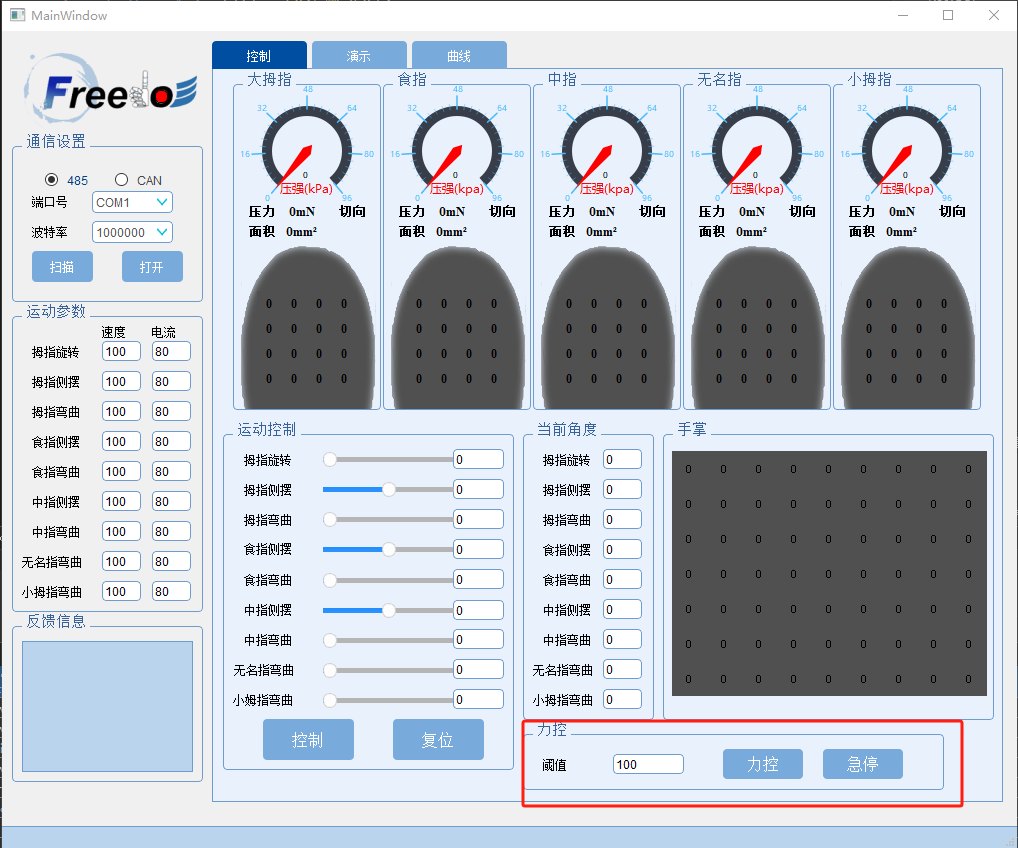
图5-9
4.5 演示
演示功能页分为快捷演示,循环演示,力控演示,以及动作序列表几部分组成。如图5-10所示

图5-10
4.5.1 快捷演示
常用指令面板:分别点击1、2、3、4、5、6、7、8、9、拳、OK、赞,可以对上述动作进行快速的演示。

图. 5-11
4.5.2 循环演示
循环演示按钮前面的两个参数对应列表的行数,循环演示功能是从列表两个行号的内的动作序列进行循环演示。可以通过双击表格内的单元格进行修改按回车进行保存。操作区域如图5-12所示。
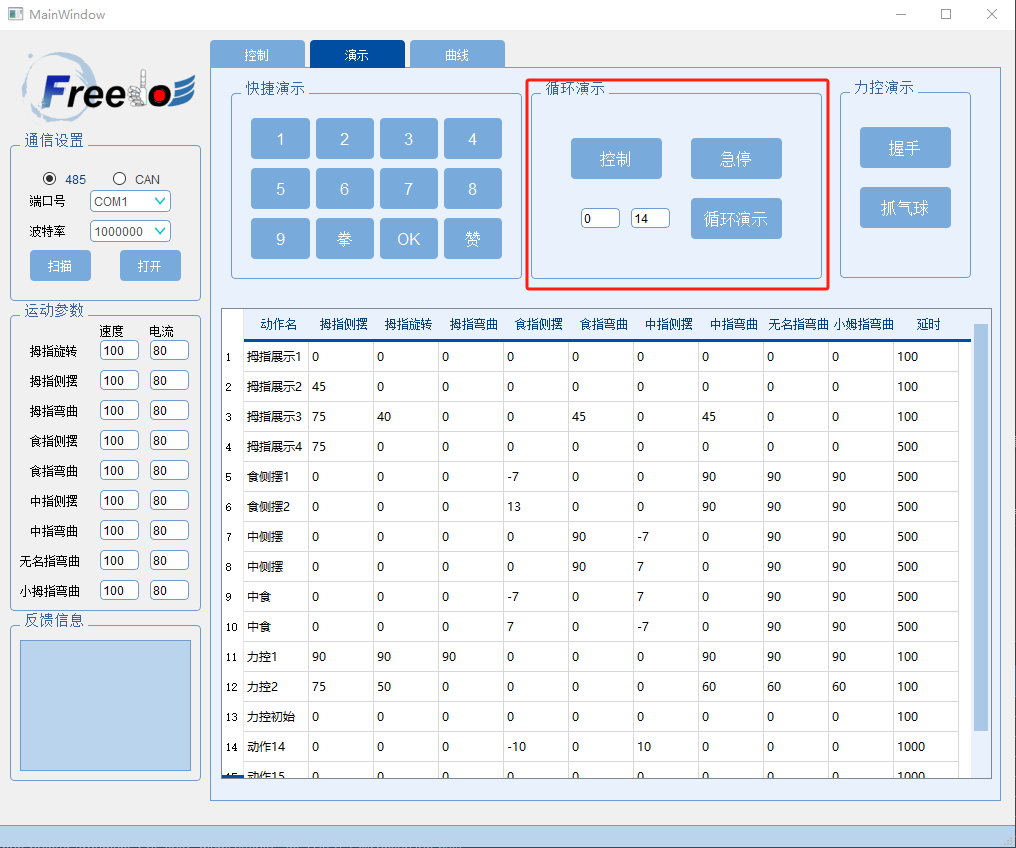
图. 5-12
4.5.3 电流力控
力控演示中握手以及抓气球为电流力控方式实现的,点击握手后拇指会转动到一定角度其余四根手指缓缓弯曲。点击松开灵巧手先张开然后拇指进行转动。点击抓气球后拇指进行转动后与食指和中指行程三指捏的姿态,在运动期间放入气球会重复进行捏,松,捏的逻辑。操作区域见5-13
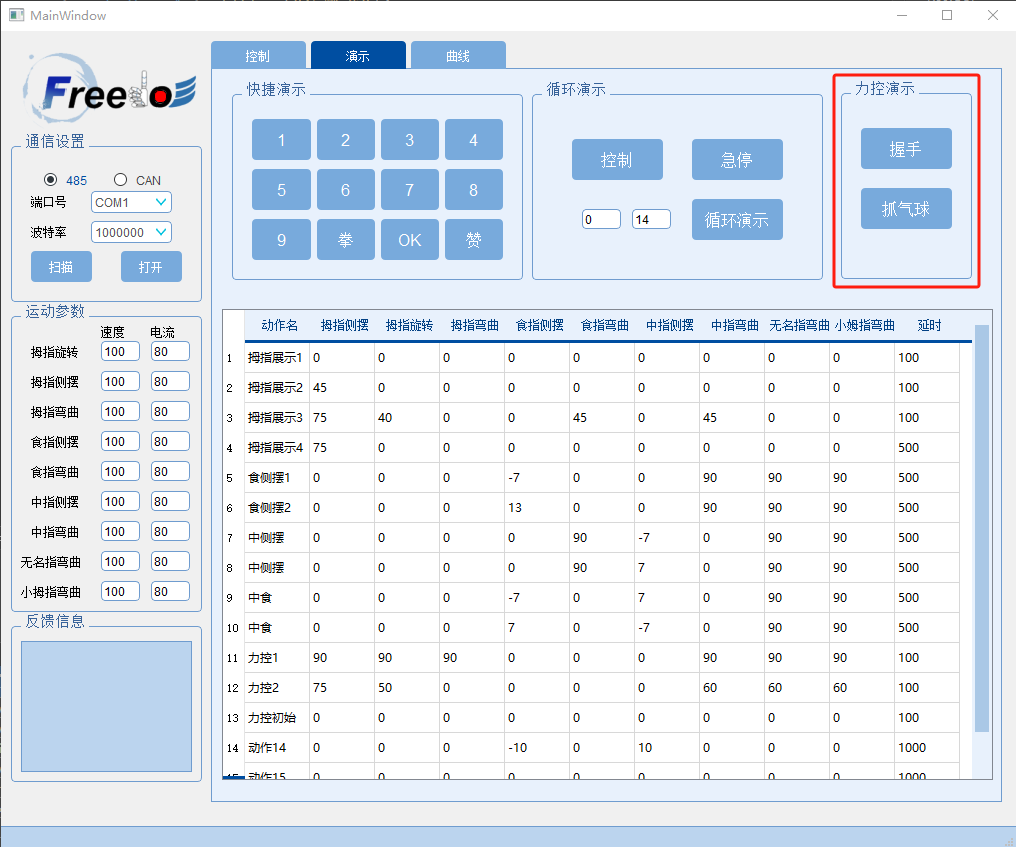
图5-13
4.6 曲线
曲线显示功能页包括,显示设置,曲线显示区域以及多条曲线勾选显示。显示设置中分为类型选择和部位选择,类型选择提供可选择项包括传感器、压强、电流,部位选择,如果类型选择是传感器和压强,部位选择分为大拇指,食指,中指,无名指,小拇指,手掌1-7行,类型选择是电流,部位选择分为大拇指,食指,中指,无名指,小拇指。操作界面如图5-14所示
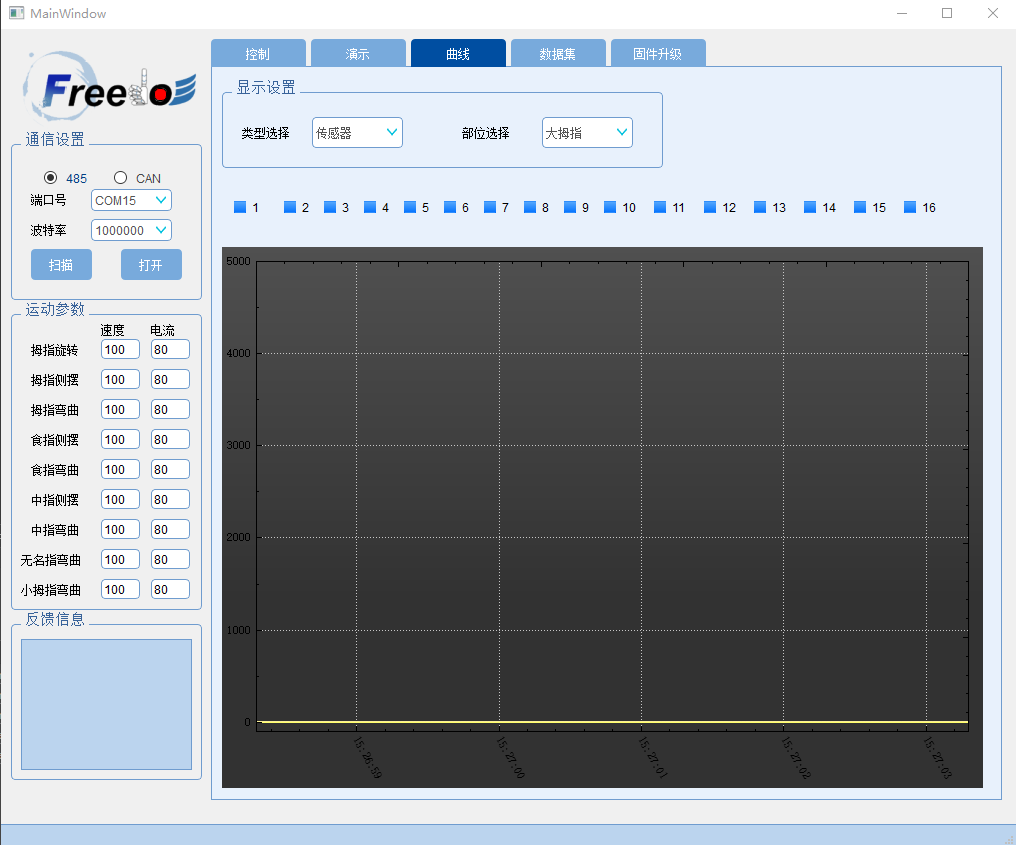
图5-14
5 产品维护
主要内容
该章主要描述灵巧手产品维护
l 机械维修
l 电气维护
5.1
机械维护
1.机械磨损:需要定期检查磨损情况。在长期使用过程中主要有以下几类磨损。
部件断裂损坏:由于承载很高的载荷,导致运动部件损坏失效,此类故障需要技术支持人员进行修复,更换运动部件。
2.指尖脱落:
指尖包覆触觉传感器的硅胶层在长时间抓取过程中容易脱胶脱落,此类故障需要技术支持人员进行修复,更换硅胶包覆层。
5.2 电气维护
1.触觉传感器故障
触觉传感器压电层使用了FSR压敏材料,该传感器容易发生的故障仍然为数据采集线松动的问题,导致接触不好。发生该故障后,需要技术人员更换传感器。
2.触觉传感器无数据
触觉传感器数据走线在手指狭小的空间经过多次轴缠绕,在长时间运动控制过程中细小的数据线可能会压断失去通讯。发生该故障后,需要技术人员拆卸更换通讯线。
5.3 注意事项
1. 使用前先阅读用户手册,对产品有一个大概的了解。
2. 灵巧手本身带有断电记忆位置功能,所以每个手指是锁定状态,切记不能用力掰动手指。
3. 进行灵巧手手控制时需要注意,执行拇指旋转后,拇指与食指进行弯曲操作要进行小角度人为判断是否会出现干涉,不能直接运行没有进行实验的弯曲角度值。
4. 修改力控角度时需要注意,拇指旋转角度非0的情况下,拇指与食指弯曲角度设定值需要进行人为判断是否会出现干涉,不能直接设定
5. 不能进行私自拆解操作,否则不提供售后服务
6. 如需将手安装置机械臂或执行器末端,应避免触碰损坏
5.4 保修条例
承蒙惠购本公司的产品。谨致谢意!为了保护您的合法权益,同时为改善对客户的售后服务,特制定本保修条例。
1、本产品自购买之日起免费保修一年,终身维护,但零附件不属于免费保修范围之内。
2、在免费保修期内,发生如下情况公司有权拒绝保修服务而酌情收取维修元件费用和服务费用。
a) 用户使用不当或者错误操作导致产品损坏;
b) 安装不当、人为掰坏或者碰撞其它物体导致的损坏情况 ;
c) 未经授权而擅自拆开设备进行维修的。
3、送修产品请妥善包装运送,运送过程如有破损或遗失,本公司恕不负责。
本公司保留最终解释权,如有修改恕不另行通知。
::资料下载::
Freedom H5R/LW2 灵巧手




























































